Транспорт
Данные EtherCAT передаются в виде пакетов, которые полностью совместимы с Ethernet-пакетами. Это означает, что EtherCAT-пакеты на физическом (PHY) и MAC-уровне построены так, что для Ethernet-сетей они выглядят как родные и устройства типа роутеров, свичей и хабов могут передавать их не задумываясь, наравне с остальными пакетами Ethernet. Если же необходимы более высокоуровневые фишки (типа IP-роутинга), то без проблем можно перейти на уровень выше и поместить фрейм EtherCAT в UDP/IP датаграмму.

Изображение: beckhoff.com
Фрейм
Упрощенно EtherCAT фрейм состоит из заголовка и данных, но сейчас нам будет интересен только заголовок (header), который в свою очередь состоит из поля длины и поля типа данных, который определяет протокол передачи данных внутри пакета:
- EtherCAT Device Protocol
- Тип 1: данные EtherCAT.
- EtherCAT Automation Protocol (EAP)
- Тип 4: Синхронный обмен операционным пакетом, PD (Process Data Communication).
- Тип 5: Асинхронный обмен через "почтовые ящики" (Mailbox communication). Для асинхронного обмена доступен только протокол AoE (ADS over EtherCAT). Остальные протоколы, такие как CAN, SERCOS, PROFIBUS и т. п., передаются "внутри" его фреймов.
При непосредственном подключении EtherCAT-подчиненного к мастеру всегда используется EtherCAT Device Protocol (тип 1). Для этого на подчиненном устройстве устанавливается специальный микрочип — EtherCAT Slave Controller (ESC). Для остальных видов связи, в том числе и для построения сложных маршрутов, используется EtherCAT Automation Protocol (EAP, тип 4 или 5). Оба протокола могут использоваться как синхронно, так и асинхронно.
Подробнее о структуре фрейма EAP можно прочитать в справочной системе — EAP telegram structure.
Синхронный обмен
Ключевые слова — PD, PDO. Максимальная длина EtherCAT-телеграммы — 1472 байта. Синхронный обмен происходит с помощью следующей сетевой матрешки:
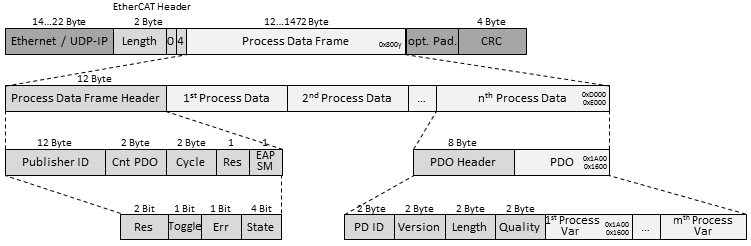
Изображение: beckhoff.com
Телеграмма состоит из заголовка Process Data Header (PDH) и одного или нескольких операционных наборов данных Process Data (PD). Заголовок содержит Publisher Id — уникальный идентификатор устройства отправителя (издатель, publisher) данных. Кроме него есть счетчик, нарастающий каждый цикл, и поле с общим количеством блоков, расположенных в PD.
Каждый операционный набор (PD, Process Data) состоит из одного или нескольких PDO. Каждый PDO состоит из заголовка PDO Header и одной или нескольких переменных PDO Variables. PDO Header содержит идентификатор переменной и ряд других полей: версия PDO, длина PDO, свежесть данных в 100 микросекундных интервалах.
Если асинхронный обмен может происходить в произвольные моменты времени, то синхронный обмен обязан происходить через равные промежутки времени, что достигается двумя способами:
- Pushed Data Exchange (способ проталкивания) — когда "издатель" (Publisher) отправляет PD в сеть через равные промежутки времени или при изменении своего состояния, а "подписчик" (Subscriber) принимает и обрабатывает. Таким образом работают "сетевый переменные" (Network Variables) в TwinCAT 2. За один раз отправляется и принимается один фрейм данных.
- Polled Data Exchange (опросный способ) — когда "клиент" отправляет запрос, в котором содержится его PD, а в ответ получает отдельный фрейм ответа с PD информацией сервера. Работает клиент-серверная архитектура, поэтому суммарно в общении участвуют два сетевых фрейма.
Здесь внезапно проявляется различие в работе протоколов EtherCAT Device Protocol и EAP, так как в случае с Device Protocol формируется один единственный большой пакет, в котором заранее предусмотрено место для данных подчиненных устройства. По мере прохождения пакета через кольцо EtherCAT-шины в эти пустые места EtherCAT-фрейма "на лету" будут вставляются данные подчиненного устройства. Это очень быстро.В случае же с EAP можно достичь 10 миллисекундного отклика, если применяются свичи и гигабитный Ethernet; и 100мс отклик, в случае применения UDP/IP роутинга. Это медленнее, но более гибко и можно запускать через интернет. При этом не стоит забывать, что параллельно в сетях Ethernet могут общаться и другие устройства, что в свою очередь может привести к нарушении синхронности обмена сообщениями.
Pushed (1) способ передачи позволяет передаваться данные как на одно устройство, так и на группу устройств:
- Unicast: один издатель — один подписчик.
- Multicast: один издатель — группа заданных подписчиков.
- Broadcast: один издатель — все доступные устройства.
Триггеры
Отправка EAP телеграм основана на механизме триггеров: происходит какое-то событие и если условие выполнено — происходит отправка ответа. Не рекомендуется использовать одновременно несколько условий для срабатывания триггера, так как система не может гарантировать их взаимодействие между собой.
Существует пять различных условий для срабатывания триггеров:
- Poll Request Rx PD — пришла телеграмма опроса.
- Divider/Modulo — регулярная отправка. Divider — это множитель для времени цикла отправки, Modulo — множитель для ожидания перед первой отправкой (смещение первой телеграммы).
- Cycle Time — отправка через заданный интервал в микросекундах. Отношение интервала цикла передачи и длительность цикла задачи должны быть кратны целому числу.
- Изменение состояния по таймауту (Change of State, CoS) — отправка происходит при изменении значения переменной. Если значение не менялось в течении заданного времени (в миллисекундах), то происходит повторная отправка того же значения, что и в прошлый раз.
- Изменение состояния с гарантированным интервалом (Change of State, CoS) — отправка происходит при изменении значения переменной. Между отправкой старого и нового значений должно пройти не меньше заданного времени (в миллисекундах).
В любом случае интервал или промежуток времени для условий должен быть равен или больше времени цикла задачи, опрашивающей устройство.Подробнее о механизме триггеров — EAP Send Mechanism.
Конфигурирование
Ранее, в TwinCAT 2, такая модель называлась "сетевыми переменными" (Network Variables). В TwinCAT 3 ее назвали своим именем EtherCAT Automation Protocol. Так или иначе, в начале вы создаете несколько переменных базовых типов или даже структур, а затем TwinCAT автоматически транслирует их через Ethernet на другие устройства (контроллеры, ПЛК, и т. п). Тем самым вы получаете более-менее синхронные данные на обеих сторонах, без необходимости в написании кода для поддержки сетевой передачи данных программой.
Создание EAP-конфигурации:
- Добавление EAP устройства.
- Отправка переменных (источник данных).
- Подписка на переменные.
- Использование типов данных пользователя (структуры).
Конфигурирование EAP-устройства:
- EAP устройство.
- Издатель (Publisher Box).
- Переменные издателя.
- Подписчик (Subscriber Box).
- Переменные подписчика.
- EAP между TwinCAT 2 и TC3 — обмен данными работает в обе стороны. Автоопределение сетевых переменных (Browse for Computer, Browse for File) работает только в одну сторону: TwinCAT 3 автоматически подхватывает переменные из TwinCAT 2.
No comments
Post a Comment
Note: Only a member of this blog may post a comment.